A* Implementation
December 10, 2014
Overview
A* Implementation
A* is a search algorithm commonly used for path finding around obstacles. The implementation of this algorithm was an assignment for our ME449-Robotic Manipulation class.
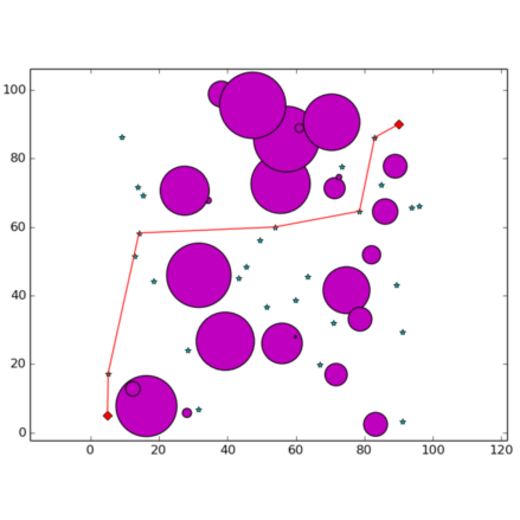
The planner takes in the following inputs and returns a graph diplaying the available path (if there is one)
- robot radius
- radii and coordinates of obstacles
- coordinates of potential nodes
- coordinates of start and goal nodes
The code can be found on my GitHub page